Authors: Ritik Mishra
Competition Robot Frame
Two days ago, we received all of the parts from CEM that we needed to assemble for our comp bot frame. Today, we got a new shipment of gussets, bearings, and belt pulleys from VexPro. This allowed us to assemble most of our comp bot frame so that it can get welded tomorrow and subsequently anodized soon.
Above: A student has brought the comp bot frame home with them so they can bring it to CEM tomorrow morning/afternoon for welding (there is no school tomorrow). Their dog is observing the robot frame.
Climber
As a recap, we have chosen a single mast 80/20 elevator for our climber. It looks like this in CAD:
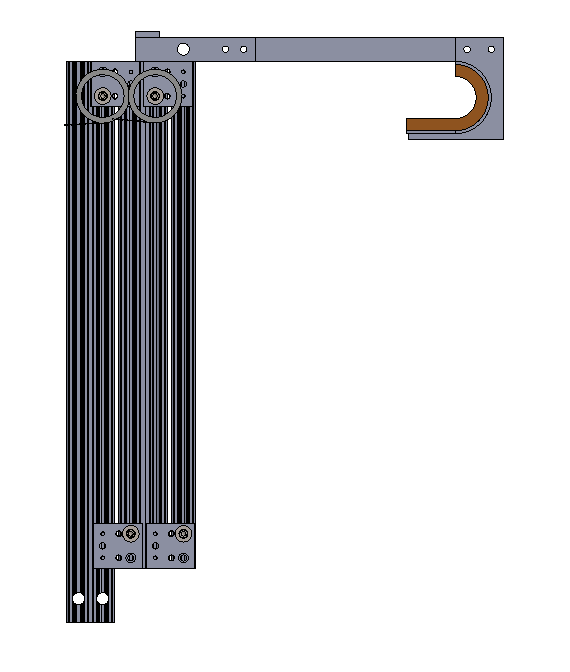
Above: A single mast, 2 stage elevator made out of 80/20 linear slides. The 0th and 1st stages are 2×1 bars, while the 2nd stage is a 1×1 bar. The hook at the top is stored horizontally, and is able to pivot upwards. The pivot allows the elevator to reach a few inches higher, giving us extra leeway when climbing.
The climber is designed to go upwards naturally, as it is preloaded with constant force springs. A winch will pull it back down, allowing us to climb.
The curved part of the hook is made from a half-pipe (like the skate park shape) whose inner diameter is larger than the outer diameter of the bar on the GENERATOR SWITCH. The inside of this pipe will be lined with grippy material (current candidate is the silicone foam from the offseason suction experiments) in order to prevent sliding sideways on the switch.
Today, we waterjet all of the plates that we need for the climber hook. They have been assembled with the few components that arrived from McMaster yesterday, and will be welded together tomorrow along with the rest of the robot.

Above: A picture of the climber hook, ready to get welded together.
Intake
Yesterday, we made all of the hex hubs for the intake rollers on the practice bot. Today, we pressed them into the rollers and assembled the rollers onto the intake. We also put the belt pulleys (which came in the mail today) and the baby neo (which came in the mail a while ago) on the intake.

Above: A picture of the mostly assembled intake.
Flywheel
Today, we got 2 belts in the mail from VexPro. For reference, we have more than 2 timing belts on our robot. We ordered most of our belts from SDP/SI, a distributor that carries many more belt lengths than VexPro at equivalent or cheaper prices. Sadly, these are taking a while to arrive in the mail. This is mildly concerning. Anyways, these VexPro belts ended up on the flywheel shooter. As a result, we were able to test our flywheel on the robot for the first time ever.
Above: A video in which the flywheel spins. A student touches a power cell to the flywheel, which is then immediately launched about 10 feet forwards.
Our shooter hood is currently being printed by Stratasys. Unfortunately, the printer that was printing the shooter hood had a pretty bad issue, forcing the operator to restart the print. This will cause us to receive the shooter hood on Saturday night instead of Friday night.
One thing that we tried to do is add rubber pads between the plates that support the flywheel shooter and the rest of the frame. We found that this helped to reduce the amount of vibration in the ground near the robot, but not necessarily in the shooter itself.
Gearbox Covers
Today, we got all of the supplies necessary to use our 3D printer that was donated to us by Stratasys. This was delayed because a label on the printer said that it was a uPrint 100, but the firmware on the printer (which is what actually matters) said that it actually was a uPrint SE Plus.
Anyways, we started printing gearbox covers for our robot. This will help to prevent metal shavings and other unwanted debris from entering the gearbox and damaging the gears.
Quote of the Day: “Reading this makes me realize that if [they] ever just told me ‘you’ll die in 30 minutes’ my reaction would be to shrug and think ‘yeah you probably right’” – Anonymous, responding to the statement that they will die in 5-10 minutes (but the timer resets on every breath).