Authors: Andrew Georgioff, Ishan Shetty, Ritik Mishra
Robot Code
The robot code is also being worked on currently so that the robot is programmatically ready for driver’s tests in a couple of days. Currently, the rookies are being helped with making different subsystems on the robot. These subsystems include intake, shooter, and climber. The senior programmers are helping the rookies while also focusing their efforts on the autonomous code for the robot. The auto-targeting command, using vision, had a successful test a few days ago.
Code for our 2020 robot can be found at: https://github.com/Team-2502/RobotCode2020
Time Tracker
The first time tracker prototype was tested today. It is currently being hosted on an old driver’s station. The time tracker will be tested for 3-4 days to check for consistency before we start to fully rely on it for tracking room hours.
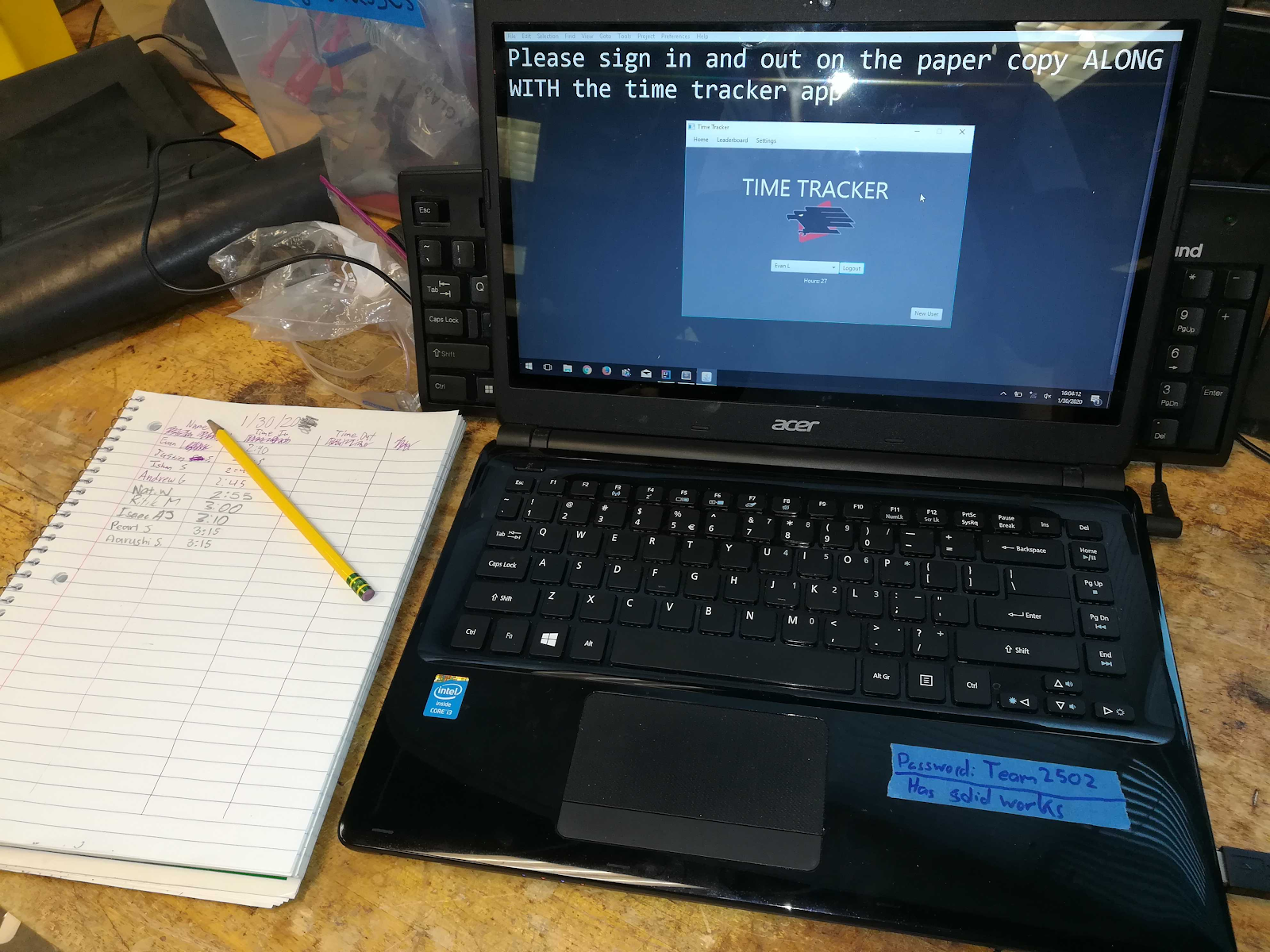
Changes are currently still being worked on including the addition of a leaderboard (for ego points) and new UI. On the backend, a new system was added that adds a ‘suspicious’ tag to users that get more than 12 hours in a single stretch. This does not affect total hours but flags the user to be checked manually at the end of the season for lettering requirements.
Code for our Time Tracker can be found at: https://github.com/Team-2502/TimeTracker
Hopper system
Today, we prototyped a new hopper system. The mechanism had a trapezoidal shape, with polycord on both of the angled sides in addition to a belt in the middle on the bottom. The goal of this prototype was to quickly and efficiently direct the balls to the end of the triangle.
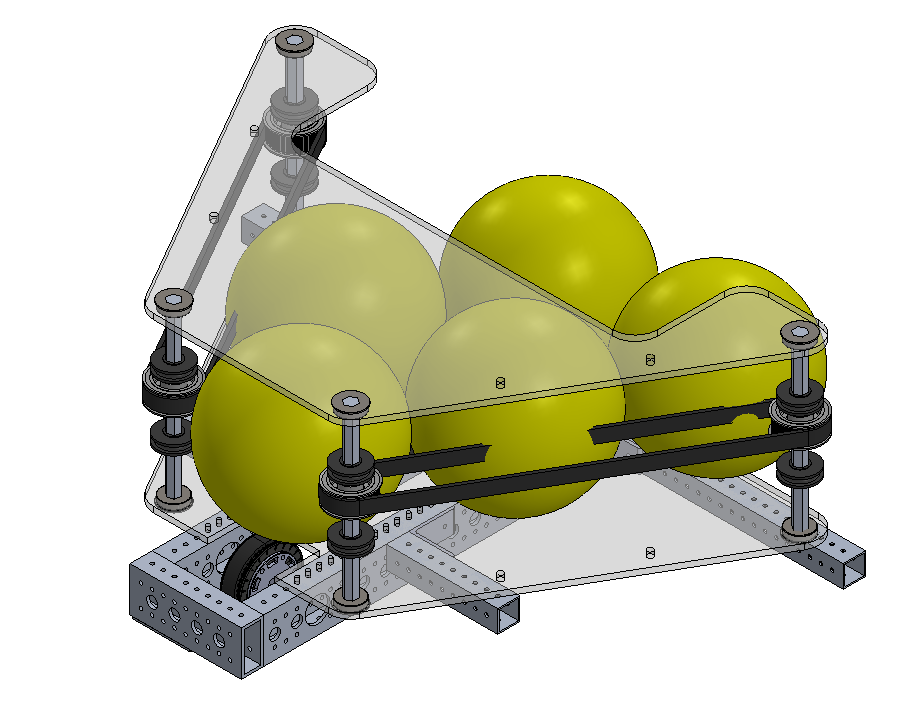

There was too much compression on the end, so the balls couldn’t come out of the exit. Otherwise, the design is promising.
Quote of the day: “Eclipse is working ok, I guess, I dunno” – Evan Lembke