Authors: Ritik Mishra, Andrew Georgioff, Ravisha Jaiswal
Introduction
Today was Justin’s birthday. If you don’t know who he is, he’s our junior engineering captain. Happy birthday Justin 🙂
Turn Table V2
Last night, a new design for the turn table was made using the lessons we learned yesterday.
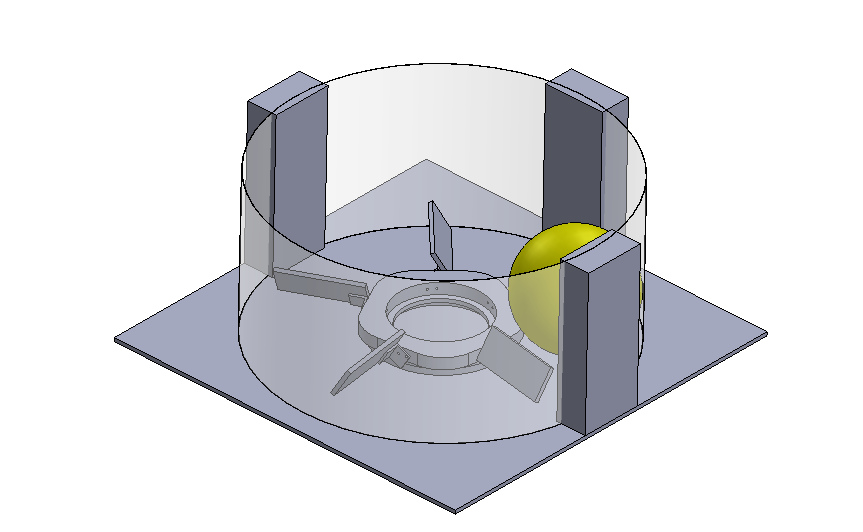
There are two notable design upgrades. First, the fins of the turntable are slanted (the turntable will rotate clockwise), preventing the ball from getting jammed between the fins and the turntable’s bottom. Second, the central bearing is now a lazy susan, allowing us to put other mechanisms (climber!) in the middle.
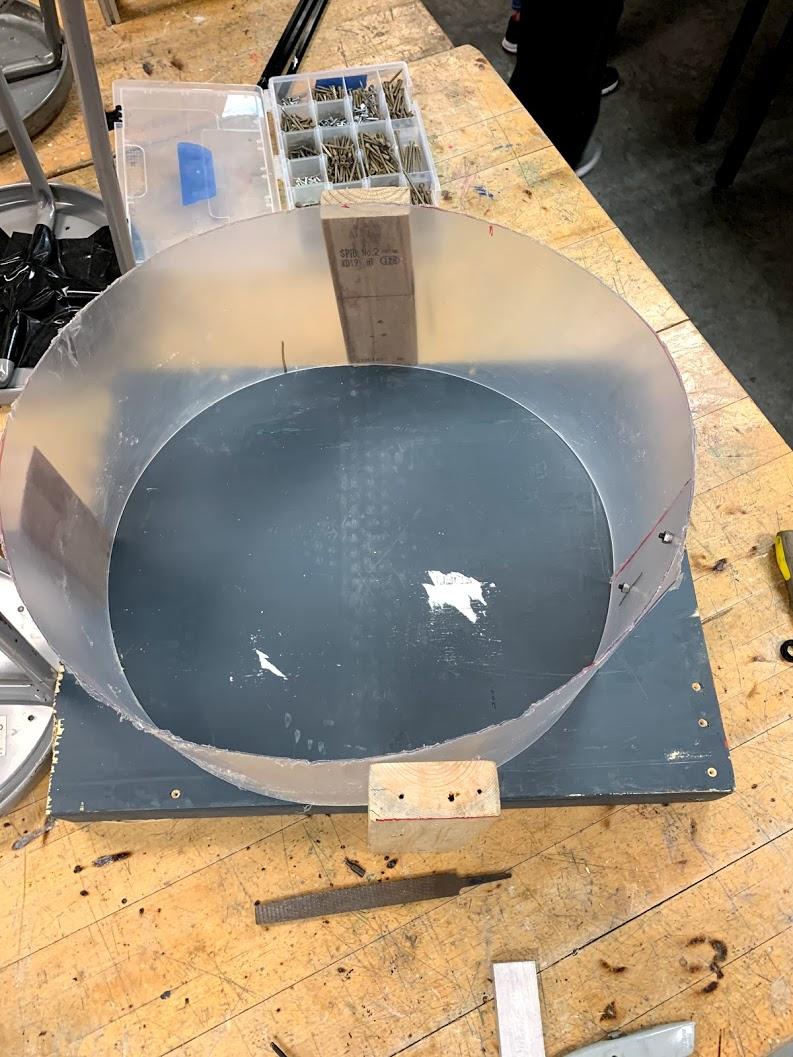
The base, outer cylinder and the inner rounded pentagon have been made today. Once the bearing gets here in the mail, everything can be fully assembled

Rotary OBA
Fabrication progress is continuing on the rotary OBA. This is the second iteration of the design. The biggest change is that there are now two rows of wheels.
The main frame that holds the wheels has been assembled. The plate that attaches the pneumatic cylinder to the OBA body has also been made.

Sgt. Sammy’s Plastic Surgery
The programmers continued to install encoders on our off-season robot to test autonomous programs. Today, the RoboRIO was moved from the electronics panel to the front of the robot, where it is parallel to the ground. The second encoder is almost on the robot, as the second wheel shaft has been reinstalled with the magnet, and the encoder bracket is complete. All that is left is to rivet the encoder bracket and its shims to the robot.
Side note: The effective bending radius of polycarbonate is about equal to material thickness. The “actual” bending radius is probably smaller, but with the methods available to us right now (the vise and a block of wood), it is hard to bend the plastic exactly at the corner of the jaw.
Tunnel
Progress continued on the tunnel prototype today. As a reminder, it is a method for storing balls that come into the intake and feeding them 1 by 1 into the shooter. It was fully assembled and tested thoroughly in both horizontal and vertical positions.

Single Flywheel
Progress on the single flywheel prototype continued today. We started to make the bearing plates that will hold the feeder wheels and flywheel. We also freed up a NEO to use to drive the flywheel shaft. Assembly will continue in accordance with the CAD model.
Double Flywheel
A NEO was installed and connected by HTD 5mm belt to one of the wheels in the double wheel design. We found a belt pulley on WCP that goes directly onto the NEO’s 8mm keyed shaft, but it was 10 dollars and not in our shop, so we 3D printed it. Next steps require the double flywheel team to figure out how to spin the NEO with a Spark MAX.
Dean’s List Nominations
The Google Form for Dean’s list nominations opened up today. The FIRST Dean’s List Finalist Award is an award that is bestowed upon an individual sophomore or junior at a regional event. This individual is one who goes above and beyond for their team and teammates. See the criteria for award winners here. In summary, they must be a dedicated member of the team, exhibit leadership qualities, and have good academic performance. Check Slack (#general channel) or your email to get the link to the Google Form.
Crisscross Intake
Another intake design which we started prototyping today was a criss-cross intake. The idea behind this design was that it would be a V shape that would help to funnel the ball over the bumpers and into the robot. This design uses flat sheets of plywood as a base, wood 2x4s as the sides of the V, and polycord + pulleys in a criss-cross pattern across the V to pull the ball. The design was not successful in our tests today. The two 2x4s did not come together when we spun the two pulleys at the tip of the V with drills, stimulating the effect of motors. We think that we need to change the way the poly-cord is wrapped to make this design functional.
