Authors: Ritik Mishra, Andrew Georgioff

Intro
So much happened today! The robot is Working ™. It intakes balls, pulls them through the lemon squeezer, stores them in the hopper, and then shoots them. There are still many improvements that can be made, such as code changes for the mechanism that feeds balls into the shooter. We also set up the field for Week 0.
Before we start off with the most important thing that happened in the room today, we would like to mention that ALL of our VersaPlanetaries turned out to be assembled incorrectly. For some reason, in all of them, the set screw holding the first stage of the gearbox to the motor shaft was not assembled quite right in any of our VersaPlanetaries. For some reason, this has not been a prominent problem in past years. Please teach rookies how to not be bad at assembling planetary gearboxes.
Eye Wash Station
Today, one of our mentors brought in an eye wash station. This station is the kind that has sealed bottles that are unsealed before being emptied into the user’s eye. This is a safety measure for our 3D printed part washer, as the Stratasys Juice ™ that it is filled with would probably cause problems if it splashed into your eye.
Above: A picture of the eye was station, located near the entrance of the closet
Finalizing Pneumatics
Today, we finished all of the pneumatics that were unfinished yesterday. We also added a code change that ensures that the compressor will actually run. The code has been confirmed to shift the gearbox.
Shooter
We received the second piece of our shooter hood from Stratasys today. Within the hour that it was delivered, it was assembled onto the robot. It is quite robust, but it was also quite sharp before we broke the edges.

Above: A picture of the shooter hood assembled onto the robot. Some rivets are sitting in a weight saving cavity. This cavity is very versatile and can hold cables, fluid containers, and FTA treats.
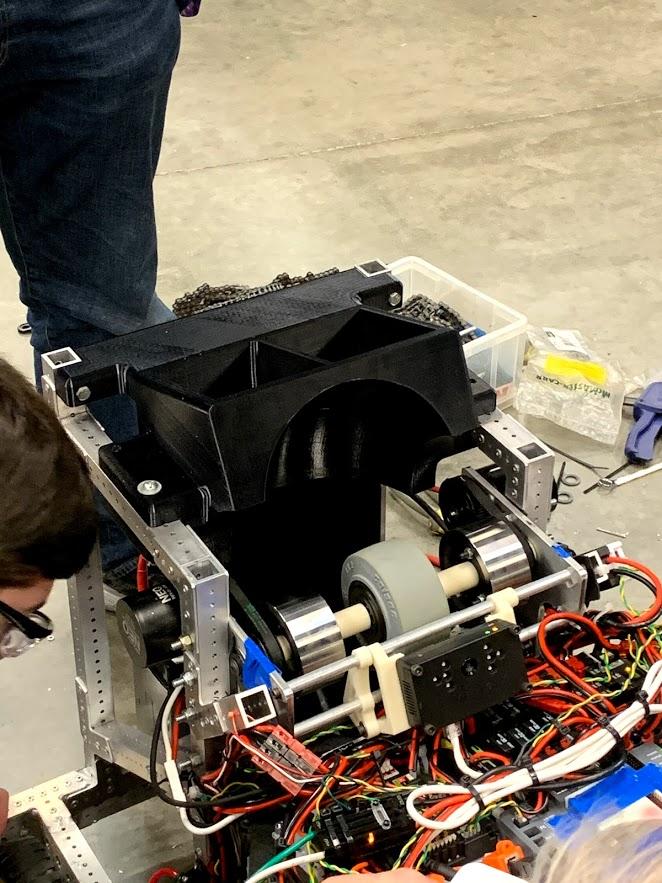
Above: A picture of the shooter hood on the robot. The seam between it and the lower hood is negligible.
Limelight Mount
Last night, we started printing a limelight mount. Today, it finished printing. One issue that we encountered was that the Limelight mount put the Limelight directly on top of the PDP ports, which is not good for the wires. We will likely need to move either the Limelight or the wires (i.e have better wire management) so that the Limelight will fit. In any case, it will not be ready for week 0 tomorrow.

Above: A picture of the limelight in its mount.
Climber
Today, the climber was installed on the robot! It will likely be ready to test for the first time at week 0 tomorrow. One problem that was solved today was the problem of raising the hook when the climber was fully raised. This problem was solved by tying a string between the bottom of the hook (which is free to pivot up and down), and a scrap piece of hex shaft. The hex shaft was dropped down a the cavity in the middle of the 80/20 2×1, and is prevented from coming out by a plate that caps the top of the bar. This way, as the 2nd stage raises, the string pulls up the hex shaft. When the hex shaft hits the cap plate, the hook is forced to pivot up.
We also installed the winch, winch gearbox, ratchet, and necessary electronics onto the robot. The code for the climber was also written and deployed.

Above: A picture of the climber on the robot. The winch, winch gearbox, and ratcheting wrench are visible in this picture.
Above: A video showing the climber hook deploy mechanism in action
Intake
The motor on the intake was wired up to the rest of the robot. It has been confirmed to intake balls over the bumper. However, the compression between the first roller and the bumper could be a little more. One reason this compression might be less than we wanted is because the pool noodles we bought turned out to actually be 2.25” instead of 2.5” like they were CADded to be. We also found that the ball will jam against the intake support plates (airpods.sldprt) if the ball is intaked near either side of the first roller.
Hopper
Today, we attached polycord to the sides of our hopper. We had to do this because the belts still haven’t arrived yet (smh @ SDP/SI). This was mildly difficult since we did not have a great way to hold the ends of the polycord together while they are in tension. We ended up avoiding the problem altogether by welding the polycord off of the robot, when it is not in tension.
Notes:
- We did not put the bottom belt in
- We put two motors on the hopper, one for each side. Ideally, we can drive both sides with one motor, and use the second motor for the bottom belt instead.
The Feeder Wheel
The exit of the hopper is too low for balls to get into the shooter. There is a single feeder wheel that, in conjunction with the lower hood (see yesterday’s blog post for details), moves balls upwards into the shooter subsystem. Today, we installed it. There are still some potential software improvements (such as only allowing it to feed balls in if the flywheel is spinning) that can be made, but for now, the current code works well enough.
Code: Confirmed to Work
Once the finalizing of mechanical components were done, code was tested. Overall the code worked well, but there were a few minor changes that needed to be made. One of these was adding a reverse mode to the hopper for if two balls got stuck and would not advance. Other fixes were more minor, such as switching the direction of the motors which spinned the polycord on the hopper.
Robot Testing
All additions are described above. The following video shows everything in action. As said in the intro, we had several issues with VersaPlanetary set screws and the like.
Field Setup
The field for our week zero event tomorrow was set up today. This was accomplished with the help of other Southwest Hub teams. These teams not only helped by providing laborers to assemble the field, but also by providing some field elements, such as the other power port, both loading bays, and the other trench run.
Can’t wait for Week Zero tomorrow!

Above: The fully assembled field.
Quote of the Day: “Who took the – I mean it was me, but where did I put it.” – Justin Silewski, Engineering Captain looking for hex shaft.