Authors: Ritik Mishra, Andrew Georgioff, Ryan Alexander
Intake Prototypes: Linear, Rotary, Fourbar
In order to shoot the ball and score points, the robot must first pick it up. Several intake prototypes have been started today, specifically the rotary OBA (over-the-bumper active intake) and the linear OBA.
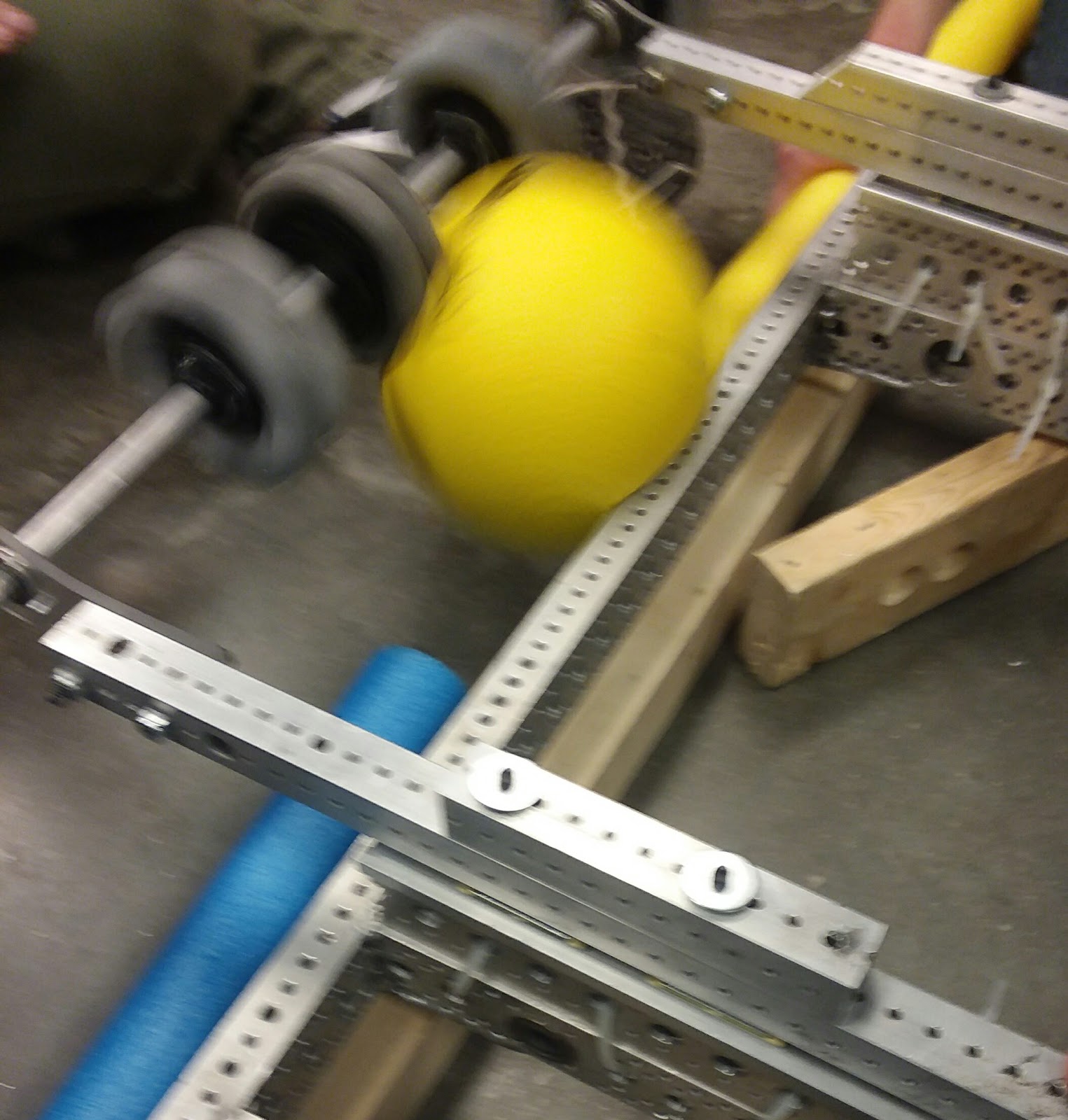
There is a team working on a linear OBA. Their prototype is completed and functional. The parts used include Mecanum (vectored intake) wheels and the KOP igus linear slides. This prototype was attached to an old robot frame for testing purposes. In the process, the different ball compressions were also tested.
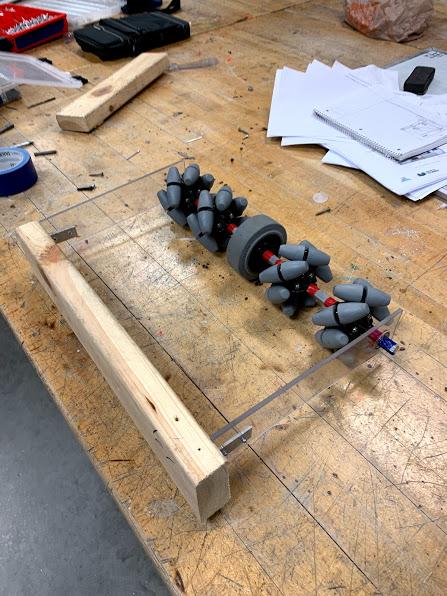
Another team has also started an intake prototype today: the rotary OBA. They have completed a base, but they still need to attach it to a frame of some kind to test the rotary OBA.
The last intake prototype being worked on is the fourbar OBA. The brainstorming process has been completed and parts have been collected, but they still need to assemble it.
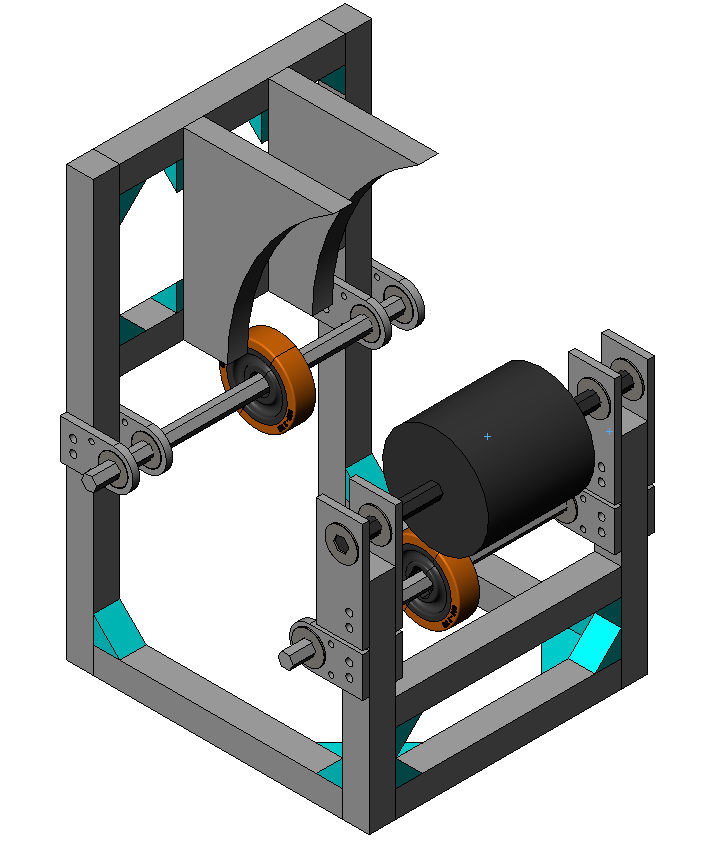
Flywheel Shooter
Since we have to get the ball up high, yet can’t extend higher than 45 inches, we have to shoot it up there somehow. One way is a flywheel shooter, where the ball touches a wheel that is spinning really fast so that the ball is launched. We found a flywheel shooter prototype from the 2017 offseason, but it is currently too narrow to fit the Power Cell.

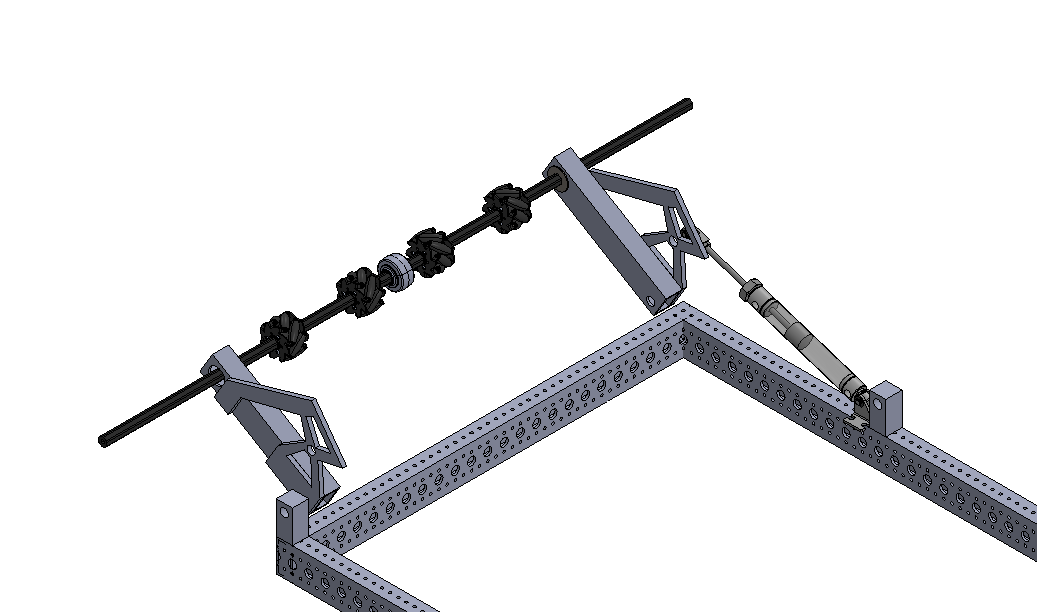
Spring-loaded climber
For the spring-loaded climber, Nathan finished 2 stages and attached constant force springs to it to move it up. It’s made out of the 80/20 first-party linear slide bearing things. Basically, the idea is that a winch pulls it down, and when the winch unwinds, the constant force springs pull the thing up in order to deliver the hook.
Turntable/Roulette Ball Handler
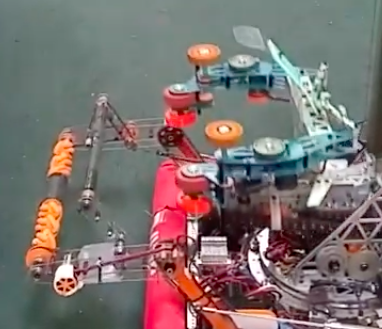
This year, we are allowed to hold up to 5 Power Cells (balls) in the robot. We need to have a way to “serialize” the balls so that we can pass them one by one into the shooter. One of these ball management prototypes was inspired by team 1986 in 2017. That year, they were one of the top shooters in the world and were the alliance captains of the finalist alliance on Einstein.
Pictured: The turntable ball handler from team 1986. See their reveal video to see it in action
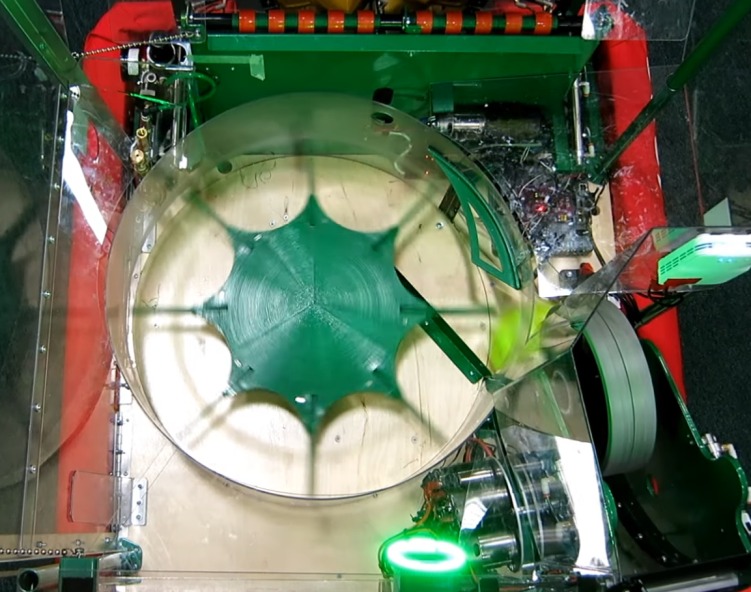
With this in mind, Rahul and Adhi got to work on a prototype. Since we can only hold 5 balls, the central “hub” is a pentagon shape. Initially, it was circular, but it was a lot harder to get the spokes to be a consistent angle apart from each other that way because of the curved surface.
Fun fact: The pentagon had to be made using two 2×4’s screwed together because one alone was not wide enough.
Scouting Meeting
In the scouting meeting conducted today, we discussed what metrics we will need to scout for Infinite Recharge. We discussed how we would evaluate other teams’ performances and what info we would need to make picklists from different picking positions, as well as what metrics would be necessary for match strategy. Further discussion ensued regarding what metrics could be pit scouted and what needed to be match scouted. Finally, we discussed preliminary designs for the scouting app.
We had a meeting today to discuss strategy for the season. One primary thing we discussed was the scouting app. This is an app designed this past summer by our programming team for a better and more effective scouting experience. We discussed what were the most important metrics to note, how we would measure different parts of a team’s performance, and how we would layout the user interface to make it as simple to use as possible. We also discussed potential strategies for regionals and considered what we believe will be common strategies.
CAD progress: Drivetrain Mostly Complete!
CAD has been progressing very quickly this season. Isaac Wenc has already designed the essential parts of the drivetrain, in accordance with the results of the Drivetrain Meeting yesterday.
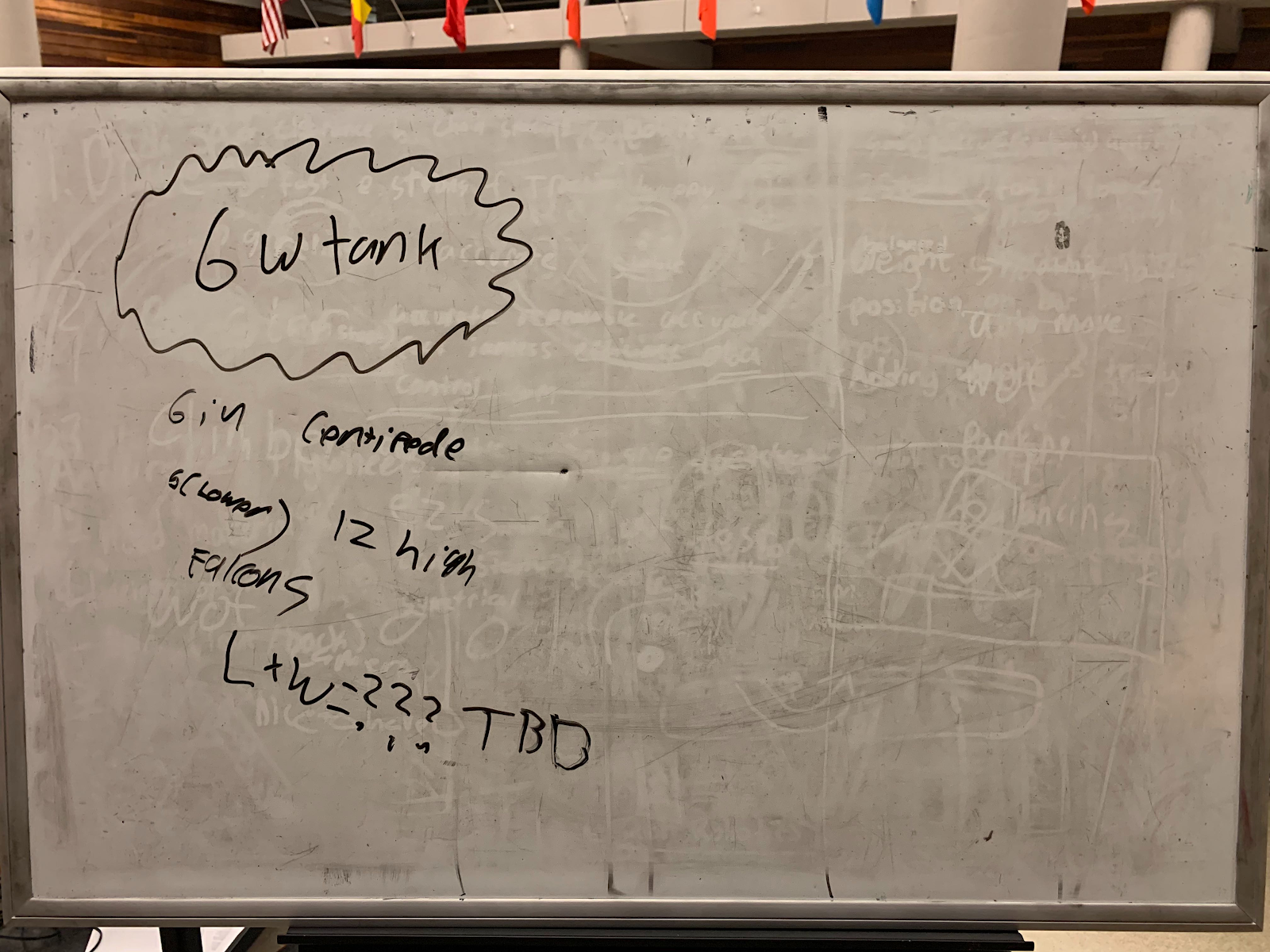
We decided to run 6 wheel tank with a dropped center (as usual; no corner Omnis) with 6-inch centipede wheels to go over all the bars on the ground in the rendezvous point. We opted for a dual-speed drivetrain which should have a speed of 6 feet/sec in low gear and 12 ft/sec in high gear when using Falcons.
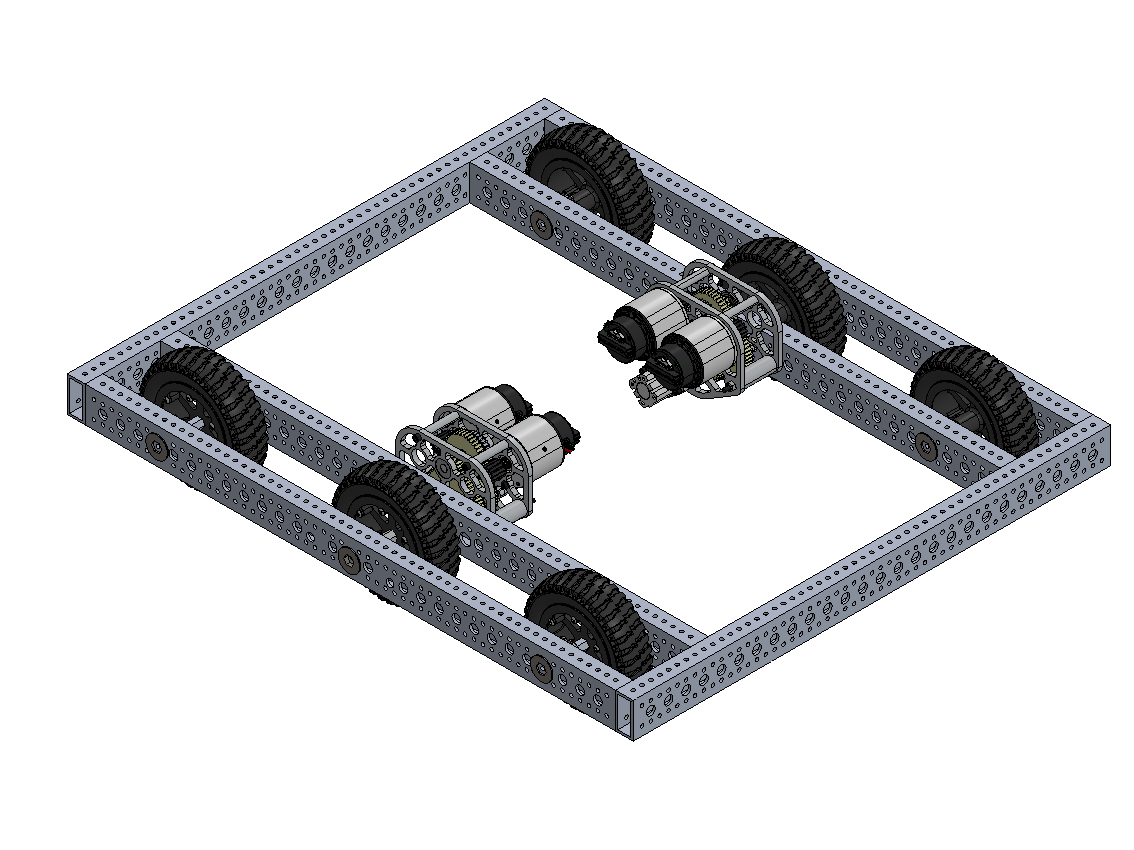
We still need to add brackets and check that the hole spacing is correct for chain tension purposes.
As for other mechanisms, people have started to CAD them as well!
Quote of the day: “Just gonna send it!” — That snowmobiler guy